KWB Easyfire + Comfort 4
Sonntag, den 13. November 2022Seit zwei Jahren haben wir eine KWB Pelletsheizung im Keller und sie funktioniert super. Sie ist sogar smart und schickt Daten an den Hersteller. Doch leider ist das Dashboard dort sehr beschränkt. Man sieht Daten nur über die letzte Stunde, was einen Vergleich oder eine Analyse unmöglich macht. Mir ist nach einiger Recherche aufgefallen, dass die Comfort 4 bereits einen Modbus TCP Server integriert hat, doch leider bekam ich nach dem Aktivieren den Hinweis, dass ich dazu eine extra Lizenz benötige. Daraufhin habe ich den Hersteller angeschrieben, der mir innerhalb 2 Tage sehr freundlich antwortetet, dass ich ein Softwareupdate auf die aktuelle Software 22.7.0 benötige. dieses wurde mir auch gleich inkl. Anleitung mit bereitgestellt. Da ich in der IT Welt zuhause bin, war es für mich kein Problem, das Update einzuspielen. Jemand anderes sollte evtl. über den Heizungsbauer des Vertrauens gehen und sich das Update einspielen lassen.
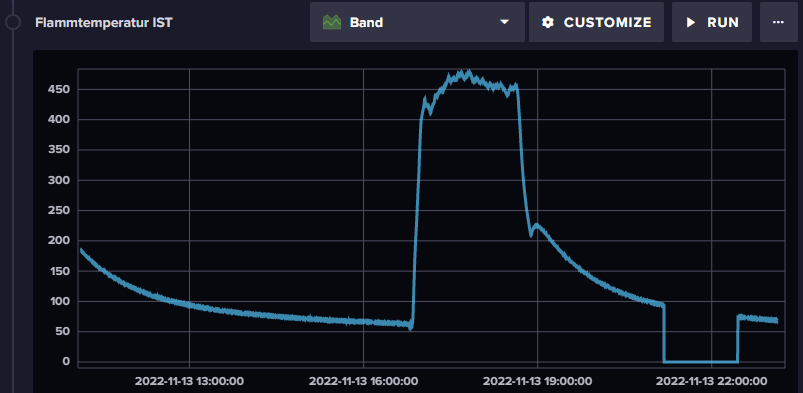
Nachdem Update gleich nochmal die Modbus Option aktiviert – man braucht keine extra Lizenz mehr. Nachdem meine Berührungspunkte mit Modbus TCP bisher sehr gering war, habe ich mich erstmal eingelesen und mir ein kleines Tool in dotnet C# gebaut, welches eine Auswahl an Datenwerten vom Modbus ausließt und diese in eine MQTT schreibt, so dass diese dann dort variable weiterverarbeitet werden können. Ich schreibe die Werte aktuell über influx telegraf in eine influxdb. Diese Datenbank ist eine Timeseries Datenbank und für sowas wie gemacht – und das beste – sie bietet direkt von Haus aus ein rudimentäres Dashboard, mit dem man auch schon Graphen zeichnen kann. Ich habe bereits einen weiteren Mitstreiter gefunden und frage mich, ob es da draußen noch mehr KWB Besitzer mit Comfort 4 Steuerung haben, die Interesse an mehr Daten aus ihrer Heizung haben. Mein aktueller Plan ist, das ganze als Sourcen und Dockercontainer zur Verfügung zu stellen, so dass man es einfach benutzen kann um die Daten abzugreifen. Wer hier aber schon in der Entwicklungszeit mitmachen möchte kann sich gerne via Email an mich wenden (Adresse im Impressum)